是利用静电为能量源的一种能量转换装置。具有结构简单,空载转速高的优点,随着MEMS( 微机电系统)开发的深入,作为MEMS中关键部件的静电电动机的研制越来越受到人们的关注。目前静电电动机已经在一些基本上不需要功率输出的场合得到了应用。
随着MEMS(Micro Electro Me-chanical System ,略记为MEMS,意为微机电系统)开发的深入,作为MEMS中关键部件的静电电动机的研制越来越受到人们的关注。静电电动机是利用静电为能量源的一种能量转换装置。具有结构简单,空载转速高的优点,但也有功率小,启动难等缺点。目前,各发达国家竞相开发静电电动机并且已经取得了一些阶段性进展。鉴于MEMS在推动国民经济和军事技术发展方面的重要性,我国国防科工委已经把MEMS 列入了“九五”国防预研项目。目前,在航天卫星和医疗器械领域中已经开始尝试用静电电动机来代替传统的电磁型电动机。
静电电动机的运行原理有两种:一种是利用介电驰豫原理,另一种是利用电容可变原理。
1.利用介电驰豫原理的静电电动机一般被称为静电感应电动机或异步介电感应电动机。其具体原理如下:如果将一个介电转子置于旋转电场中,那么就会在转子表面感应出电荷,由于介电驰豫,这些电荷滞后于旋转电场,这些感应电荷与旋转电场之间的偏移就产生了一个作用在转子上的转矩。如果转子由多种介质构成,那么不同的介电驰豫过程就会被叠加,在不同的频率下起作用。由于电动机运行时,转子的角速度小于旋转电场的角速度,因此这种电动机被称之为“异步”,电动机的转矩与效率都取决于转子角速度与旋转电场角速度的比。图1 所示的是异步介电感应静电电动机的结构示意简图。
电极静止排放,相差90°相角的两个电压用来产生旋转电场。
感应型静电电动机有其自身的优势:,感应电动机靠介电驰豫来建立转子上的电荷分布,而不是靠转子的凸极结构,于是感应电动机的转子可以是光滑均匀的,甚至可以是液体。所以从制造工艺上讲,感应电动机比电容可变电动机有优势。第二,感应电动机是异步运行的,所以它可以不需要转子位置的反馈就可以获得较好的运行性能。第三,在感应电动机某一特定的运行状态下可以提高轴承摩擦和磨损的特性。但是由于介电感应电动机材料的电性能对电动机的运行有很大的影响,因此对于感应电动机而言,对材料导电性能的控制就成为设计和制作上的难点。
2.利用电容可变原理的静电电动机就是指利用带电极板之间基于静电能的能量变化趋势产生机械位移,这种作用力使两个电极趋于互相接近并达到一能量最小的稳定位置。电动机的定子为静止电极,转子为移动电极,通过限制转子向定子方向移动的自由度,就可以使转子获得一个单一方向的位移。电容可变型静电电动机的结构简单,由性能良好的绝缘体和导电体构成,它的激励只需要简单的开环电压脉冲就足够了。
电容可变型静电电动机也有着一些缺点:,为了使之能够运行,必须保证定转子间的电容可变,因此对于顶驱式和侧驱式电动机的转子就必须是凸极的结构,这样的结构做成平面化就需要复杂的工艺步骤。第二,为了获得较大的电容变化以提高驱动转矩,就需要减小定转子之间的气隙,这就又增加了加工的难度。第三,电容可变型静电电动机是同步式电动机,因此即使是最小的运行也需要转子位置的反馈,这可以说是一个很重要的缺点。,转子易受到横向电场力的作用,从而导致了轴承摩擦和磨损。
目前各国以电容可变型静电电动机的研究最为普遍广泛,电容可变型静电电动机分为直线型和旋转型两大类。
直线型电动机结构简单,易采用多种制作方法和多种材料。
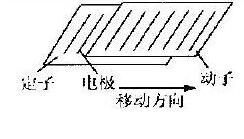
图3 所示的是1996 年由东京大学研制的一种直线型静电电动机的结构示意简图,定子和动子上都沉积有电极,通过对定子与动子间施加一系列电压可以使动子产生一步步的直线运动,运动速度的控制可以通过调节电极上施加的电压来达到,这台电动机动子电极分为四相,定子电极分为三相,采用矩形波电压驱动。
旋转型静电电动机一般是以多晶硅材料制成,形状为扁平。
旋转型静电电动机可以分为三种:顶驱动型、侧驱动型以及摆动型。顶驱动型旋转静电电动机的结构是定子在转子的上面,定子电极与转子电极之间形成电容,电容中电场变化产生一个相对轴承为切向的静电力,直接驱动电动机旋转。图4 所示的是一个顶驱型静电电动机的部分截面图。侧驱型静电电动机转子在定子的里面,电能储存在定转子电极间的气隙中,产生的静电力的方向相对轴承也为切向。
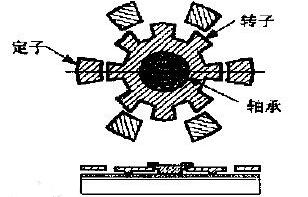
图5 所示的是加利福尼亚大学Berkeley 分校在1989 年采用IC 工艺用多晶硅制作的步进式静电电动机的俯视图与截面图。摆动型静电电动机也称为行波型静电电动机。转子的外径比定子的内径小一些,
电动机的运行依靠径向静电力吸引转子向被激励的定子电极方向运动,当按一定顺序激励定子电极,就可以实现转子在定子直径内滚动。图6 所示的是一种带有中心轴承的摆动型静电电动机的结构简图。
在这三种旋转型静电电动机中,顶驱型静电电动机由于它的定转子之间的电容变换较大,所以它的输出转矩是比较大的,但是在运行过程中会产生一个与转子电极相垂直的静电力将转子箝住推向定子电极,所以转子的稳定性是一个非常严峻的问题,对于侧驱动型静电电动机,通过轴承来确保转子在被激励的定子电极之间,于是转子的不稳定性就得到了结构性的补偿。但是对于扁平结构的侧驱型静电电动机,由于定转子电极重叠形成的电容小,导致其输出转矩过小;对于摆动型静电电动机,可以通过将电动机做得长一些来获得较大的输出转矩,但是由于转子在定子电极内作滚动运行,所以这种结构会导致所带负载摆动较大 。针对上述结构的静电电动机的缺点,为了提高输出转矩、解决转子的稳定性等问题,目前又有人提出了双定子结构静电电动机、静电悬浮式静电电动机、外转子静电电动机等新结构。
维库电子通,电子知识,一查百通!
已收录词条680117个

