磁感应传感器是一种测量空间中磁场的传感器,具有将磁学量信号转换为电信号功能。利用磁学量与其它物理量的变换关系,以磁场作为媒介,也可将其它非电物理量转变为电信号。 常用于测量永磁铁附近以及通电螺线管内部的磁场等。既可以测量磁感应强度的大小,又可以粗略判定磁感应强度的方向。
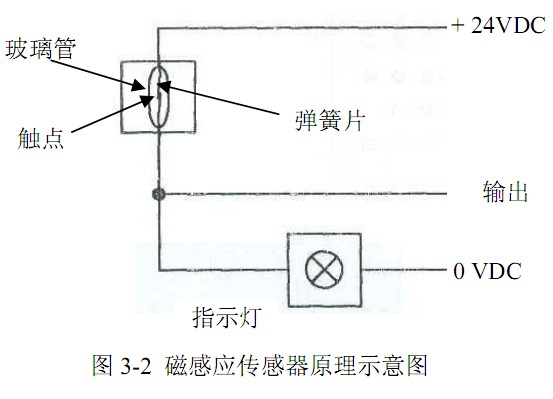
磁感应传感器其内部结构类似于我们通常所说的干簧继电器,如图 3-2所示。它是一种触点传感器。它由两片具有高导磁率μ和低矫玩力 Hc 的合金簧片组成;并密封在一个充满惰性气体的玻璃管中。两个簧片之间保持一定的重叠和适当的间隙,末端镀金作为触点,管外焊接引线。当干簧管所处位置的磁场强度足够大,使触点弹簧片磁化后所产生的磁性吸引力克服起矫玩力时,两弹簧片互相吸引而使触点导通。当磁场减弱到一定程度,借助弹簧片本身的弹力使它释放。磁感应传感器体积小、惯性小、动作快是它的突出的优点。
磁感应传感器有两种驱动方式。一是用磁铁驱动,二是用电磁线圈驱动。前者多用于检测,如用磁铁做成运动部件,一旦接近磁感应传感器便可使它吸合发出信号。后者多用于控制,若电磁线圈通电,触点便可吸合。用磁感应传感器来取代靠碰撞接触的行程开关,可提高系统的可靠性和使用寿命;因而在可编程序控制器中常用来作为行程到位的发讯装置。
磁感应传感器的种类很多,一般可分为物性型和结构型两种类型。物性型磁传感器,如霍尔器件、霍尔集成电路、磁敏二极管和三极管、半导体磁敏电阻与传感器、强性金属磁敏器件与传感器等。结构型磁传感器,如电感式传感器、电容式传感器、磁电式传感器等。
(1) 磁感应强度:霍尔传感器在工作时,它所要求磁钢具有的磁场强度的大小。一般磁感应强度值 B 为 0.02 ~ 0.05T。
(2) 响应频率:按规定的 1秒的时间间隔内,允许霍尔传感器动作循环的次数。
(3) 输出状态:分常开、常闭、锁存。例如当无检测物体时,常开型的 霍尔传感器所接通的负载,由于霍尔传感器内部的输出晶体管的截止而不工作,当检测到物体时,晶体管导通,负载得电工作。
(4) 输出形式:分 NPN/PNP/常开/常闭多功能等几种常用的形式输出。
(5) 动作距离:动作距离是指检测体按一定方式移动时,从基准位置(霍尔传感器的感应表面)到传感器动作时测得的基准位置到检测面的空间距离。额定动作距离指霍尔传感器动作距离的标称值。
(6) 回差距离:动作距离与复位距离之间的值。
一、转速检测
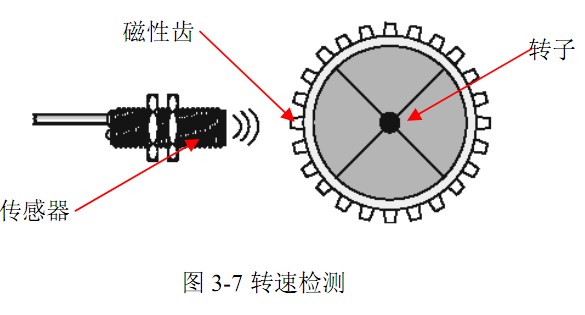
如图 3-7 所示,为了检测转子的运动速度;可以使用传感器检测。假设该转子上有 40个磁性齿,那么传感器每检测到 40 个输入信号就表示转子转了一圈。也就是说,只要统计在一分钟内,传感器检测到多少个信号,就可以推算出转子的转速。假设一分钟内,传感器检测到 40000 个信号;那么,转子的转速为400000 / 40 = 1000 rps。其中,rps 表示每分钟的转速。
二、位置控制装置

如图 3-8 所示,为了知道气缸活塞的两个位置(最内端和最外端),就可以用两个磁感应传感器来检测。在气缸活塞环上,包有一层“磁铁”。当活塞往外运动到最外端时,传感器A就发出信号(一般传感器上有指示灯);当活塞往内运动到最内端时,传感器B 就发出信号。这样就可以检测气缸活塞的位置。
维库电子通,电子知识,一查百通!
已收录词条937245个


