CAN总线控制器即Controller Area Network Bus控制器,作为一种技术先进,可靠性高,功能完善,成本合理的远程网络通讯控制方式,CAN-bus控制逐步被广泛应用到各种控制领域。CAN-bus是成为国际标准的现场总线,也是国际上应用 最广泛的现场总线之一.
多主结构依据优先权进行总线访问
无破坏性的基于优先权的逐位仲裁
借助验收滤波器的多地址帧传递
远程数据请求
全系统数据相容性
错误检测和出错信令
很远的数据传输距离(长达10Km 10Km)
很远的数据传输距离(长达10Km)
高速的数据传输速率(高达1Mbps 1Mbps)
高速的数据传输速率(高达1Mbps)
高度实时性:每帧报文允许传输8
高度实时性:每帧报文允许传输8个字节的数据
发送期间丢失仲裁或出错而遭到破坏的帧可自动重发
暂时错误和性故障节点的判别以及故障节点的自动脱离
脱离总线的节点不影响总线的正常工作
CANCAN-bus 规范 CAN-bus 规范( Version 2.0 )
CAN2.0A :CAN标准报文格式
CAN2.0B :CAN标准报文格式和扩展报文格式
ISO11898-1/2/3/4 国际标准
CAN-bus 技术规范的目的
定义数据链路层
定义CAN协议在周围各层中所发挥的作用
由于CAN协议的更新,有2.0A和2.0B两个协议.因此, 有了两种工作模式,而不同之处就是在于对待扩展帧的 处理方法.CAN控制器的两种工作模式是BasicCAN模 式和PeliCAN工作模式.两种工作模式在寄存器等方面 均有区别.
BasicCAN工作模式是基本的工作模式,对应于2.0A协 议,在此模式下只可以发送和接收标准帧报文(11位的标 识码),如果此时在CAN总线上检测到扩展帧报文(29位 的标识码)也是容许的,并且如果报文正确的话,会给 出一个应答信号,但是不会产生接收中断. 而PeliCAN工作模式则完全支持扩展帧报文,功能强大 .包含BasicCAN又比其功能多.
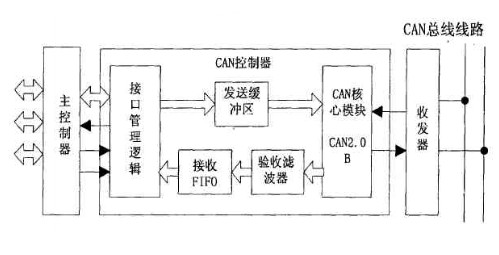
CAN总线控制器结构图
CAN总线控制器功能框图
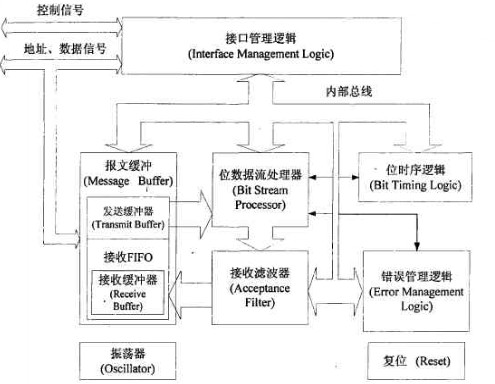
接口管理逻辑
接口管理逻辑(IML)解释来自CPU的 命令,控制CAN寄存器的寻址,向 主控制器提供中断信息和状态信息 .
发送缓冲器
发送缓冲器(TXB)是CPU和BSP(位流处 理器)之间的接口.它能够存储通过 CAN网络发送的一条完整报文.缓冲 器长13个字节,由CPU写入,BSP读出 .
接收缓冲器
接收缓冲器(RXB,RXFIFO)是接收滤波器 和CPU之间的接口,用来存储从CAN总线 上接收并被确认的信息.接收缓冲器(RXB ,13个字节)作为接收FIFO的一个窗口,可 以被CPU访问. CPu在此FIFO的支持下,可以处理一条报 文的同时接收其他报文
验收滤波器
验收滤波器(AcFAccePtaneeFilter)把它的内容 和接收到的标示码相比较,以决定是否接收下条 报文.在验收测试通过后,这条完整的报文就被 保存在RXFIFO中.
位流处理器
位流处理器(BSP)是一个在发送缓冲器, RXFIFO和CAN总线之间的控制数据流的序列发生器.它还执行总线上的错误 监测,仲裁,填充和错误处理,是 本设计中的重点模块,属于cAN总线控制器中 的中心模块
位时序逻辑
位时序逻辑(BTL)监视串行的CAN总线和位时序. 它是一条报文开头,总线传输出现到显性时同步于 CAN总线上的位流(硬同步),并且在其后接收一条 报文的传输过程中在同步(软同步). BTL还提供了可编程的时间段来补偿传播延时,相 位偏移和定义采样点和每 一位采样次数.本次设计不涉及这一块的内容.
错误管理逻辑
错误管理逻辑(EML)负责限制传输层模块的错误.它 接收来自BSP的出错报告,然后把有关错误统计告诉 BSP(位流处理器)和IML(接口管理逻辑).
维库电子通,电子知识,一查百通!
已收录词条937245个


