自适应前照灯系统(Adaptive Front-lighting Systern,AFS)是使近光灯光轴在水平方向上与转向盘转角联动进行左右转动,在垂直方向上与车高联动进行上下摆动的灯光随动系统。
(1) 传感器组。
传感器组包括光敏传感器、车速传感器、车身高度传感器、方向盘转角传感器、雨量传感器、雾传感器、风速传感器、颗粒物传感器、汽车位置传感器(GPS 信号)。
(2) 传输通路。
选择CAN( Controller Area Network) 总线作为传输通道,CAN 总线常用于实现汽车内部控制系统与各检测和执行机构间的数据通信。通过CAN 总线还可以向其它电子模块索要本系统需要的相关资源及将本系统当前的一些信息发送给其他电子模块,从而简化系统结构,实现资源共享。对应于2. 2. 1 条提出的AFS 的控制方案,CAN 节点连接图如图10 所示。
(3) 处理单元及执行机构。
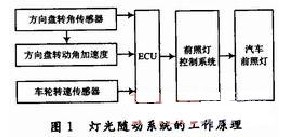
自适应前照灯系统的工作原理如图1所示。自适应前照灯系统共由四部分组成:传感器、ECU、车灯控制系统和前照灯。汽车车速传感器和方向盘转角传感器不断地把检测到的信号传递给ECU,ECU根据传感器检测到的信号进行处理,把处理完后的数据进行判断,输出前照灯转角指令,使前照灯转过相应的角度。 汽车在转弯时,重点是要提前看到所转方向的障碍物,根据现实驾驶的经验,车灯一般只需转过O~15°即可,只需要所转方向侧的那只前照灯实现智能转向就可,另一侧前照灯还是保持原来的方向。虽简化了控制,仍然能够达到预期的效果。
1.乡村道路模式(Class C):基本光型模式; 2.高速公路模式(Class E):高速路上照射距离更远,灯光更汇聚,亮度更强; 3.城市道路模式(Class V):在城市道路上,将左灯光轴向左下方旋转,提高驾驶员左侧人行道上的照明; 4.恶劣天气模式(Class W):雨/雪/雾天时,通过压低、分散前照灯的照明角度,防止在车前形成聚光,减小光线通过地面积水反射对迎面车辆造成眩光的效应,同时提高驾驶员近前方和左右侧的照明,保证行车安全; 5.大灯随动转向(Bending Mode):根据车、方向盘转角以及横摆角速度,动态调整前照灯旋转角度,保证弯道安全照明范围; 6.仪表盘故障指示:除CAN总线故障报警外,还可提供一路输出用于驱动仪表盘内故障指示灯; 7.旅行模式:车辆从靠右(靠左)行驶国家开到靠左(靠右)行驶国家时,临时切换灯光照射角度,避免造成对面驾驶员炫目。 更多精彩词条,请登入维库电子通(https://wiki.dzsc.com)
维库电子通,电子知识,一查百通!
已收录词条937245个


