磁电式传感器利用电磁感应原理将输入运动速度变换成感应电势输出,是一种有源传感器。它不需要辅助电源,就能把被测对象的机械能转换成易于测量的电信号。并且,它具有双向转换特性,利用其逆转换效应可构成力(矩)发生器和电磁激振器等。有时磁电式传感器也称作电动式或感应式传感器, 它只适合进行动态测量。由于它有较大的输出功率,故配用电路较简单;零位及性能稳定;工作频带一般为10~1000Hz。
磁电式传感器构成:磁路系统、线圈
1、磁路系统
由它产生恒定直流磁场。为了减小传感器的体积,一般都采用磁铁;
2、线圈
由它运动切割磁力线产生感应电动势。作为一个完整的磁电式传感器,除了磁路系统和线圈外,还有一些其它元件,如壳体、支承、阻尼器、接线装置等。
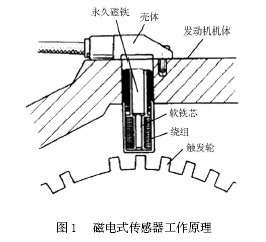
(1)工作原理
磁电式传感器的工作原理如图1 所示,它主要由旋转的触发轮(被等分的齿轮盘,上面有多齿或缺齿)和相对静止的感应线圈两部分组成。当柴油机运行时,触发轮与传感器之间的间隙周期性变化,磁通量也会以同样的周期变化,从而在线圈中感应出近似正弦波的电压信号。
(2)输出特性
由磁电式传感器工作原理可知,其产生的交流电压信号的频率与齿轮转速和齿数成正比。在齿数确定的情况下,传感器线圈输出的电压频率正比于齿轮的转速,其关系为

式中,n 为发动机转速,r/ s;z 为触发轮被等分的齿数;f 为磁电式传感器的输出信号频率,Hz 。
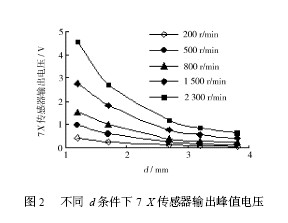
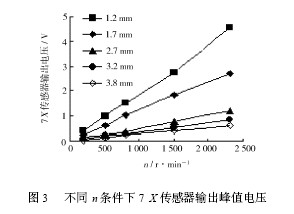
磁电式传感器的输出电压不仅与传感器和触发轮间的间隙( d ) 有关,而且与n 有关。为了设计合理的磁电式传感器信号处理模块,本研究在不同的d 以及n 条件下,通过大量的试验测出传感器的输出电压特性。
图2 为不同的n 条件下,7 X 传感器输出峰值电压与d 的关系;图3 为在不同的d 条件下,7 X 传感器输出峰值电压与n 的关系。48 X 传感器输出峰值电压信号特征也如此。从图中可看出,在同一d 条件下,传感器输出的峰值电压随n 升高而增大;在同一n 条件下,d 越小, 其输出峰值电压越高。由此可以拟合出传感器的输出峰值电压特性为

式中, V 为传感器输出峰值电压,V;n 为发动机转速,r/ s;d 为传感器与触发轮间的间隙,mm;K 为与传感器有关的参数。
一、实验原理:
磁电式传感器是一种能将非电量的变化转为感应电动势的传感器,所以也称为感应式传感器。根据电磁感应定律,ω匝线圈中的感应电动势e的大小取决于穿过线圈的磁通?的变化率:霍尔式传感器是一种磁电传感器,它利用材料的霍尔效应而制成。该传感器是由工作在两个环形磁钢组成的梯度磁场和位于磁场中的霍尔元件组成。当霍尔元件通以恒定电流时,霍尔元件就有电势输出。霍尔元件在梯度磁场中上、下移动时,输出的霍尔电势V取决于其在磁场中的位移量X,所以测得霍尔电势的大小便可获知霍尔元件的静位移。
二、实验所需部件:
直流稳压电源、电桥、霍尔传感器、差动放大器、电压表、测微头。
三、实验步骤:
1.了解霍尔传感器的结构和在实验仪上的位置,熟悉实验面板上霍尔片的符号。霍尔片安装在实验仪的振动圆盘上,两个半圆形磁钢固定在实验仪的顶板上,二者组成霍尔式传感器。
2.差动放大器调零。之后关闭电源,放大器增益调到最小。
3.装好测微头,调节它带动振动台位移,使霍尔片置于半圆形磁钢上下正中位置。打开电源,调节WD或微调测微头使电压表示数为0。
4.以此为起点,向上和向下位移测微头,每次0.5mm,记录输出数据,分别填入相应的表格中。
四、注意事项:
1.实验前应检查实验接插线是否完好,连接电路时应尽量使用较短的接插线,以避免引入干扰。
2.接插线插入插孔,以保证接触良好,切忌用力拉扯接插线尾部,以免造成线内导线断裂。
3.稳压电源不要对地短路。所有单元电路的地均须与电源地相连。
4.一旦调整好,测量过程中不能移动磁路系统。
5.直流激励电压须严格限定在2V,不能任意加大,以免损坏霍尔元件。
1. 输出波形:近似于正弦波
2. 输出信号幅值:当传感器铁芯和被测齿轮齿顶间间隙&=0.5mm,齿数z=60,齿轮模数m=2及40转/分时,输出电压V≥70mV
3. 测量范围:0-49999Hz
4. 使用时间:连续使用
5. 环境温度: -20 ~ 65 ℃
6. 相对湿度:≤ 65%
7. 输出尺寸:二线制(双芯屏蔽线)
8. 输出信号:4-20MA
磁电式传感器主要用于振动测量。其中惯性式传感器不需要静止的基座作为参考基准,它直接安装在振动体上进行测量,因而在地面振动测量及机载振动监视系统中获得了广泛的应用。
维库电子通,电子知识,一查百通!
已收录词条937245个