多级维纳滤波器MWF(MultiSTage Weiner Filter)能够快速收敛,对多级维纳滤波器作D级截断(D
通常,GPS信号抗干扰的研究方法有时频域抗干扰、利用GPS信号循环平稳特性抗干扰、阵列抗干扰以及空时抗干扰。空时联合处理具有在空时二维域剔除干扰的能力。设空时二维阵列阵元数为M,时间延迟数为N,则接收数据X(k)为MN-1维矢量,其处理的运算量约为O(MN3),随着空时处理维数的增加,运算量成立方倍增长,大运算量对计算资源消耗以及计算时长来说都是不可接受的,因此降维处理是实际应用的必然选择。
仿真采用4元加芯圆阵,圆阵半径d=?姿/2,?姿为接收信号波长,信号入射范围:方向角0°~360°,俯仰角0°~90°;期望卫星信号入射角为(0°,30°),其中方向角在前,俯仰角在后,以下入射角均照此排列。根据参考文献[5]可知,地球表面接收的GPS信号功率约为-158 dBW, 接收机热噪声密度为10lg(kT0)=-204 dBW/Hz,其中k=1.38×10-23(watt-sec/K)为波耳兹曼常数,T0=290 K为常温,仿真采用C/A码,接收机处理带宽约为5 MHz,可以算得接收机热噪声功率约为-137 dBW,因此无干扰情况下的信噪比为-21 dB。干扰全部按照干噪比30 dB设置,功率即为-107 dBW。
仿真1. 不同秩选方式对算法抗干扰性能的影响。
通过试验确定合适的秩选方法,并根据实验结果确定门限以找出的多级维纳滤波器迭代次数。干扰场景设置:两个功率相同的宽带干扰,两个干扰的来向角为(80°,45°)、(130°,45°)。
首先用仿真试验说明两个问题:(1)多级维纳滤波器做抗干扰滤波时存在一个迭代次数;(2)通过检测接收信号功率的变化比检测均方误差更容易设定准确门限。仿真图如图2所示。
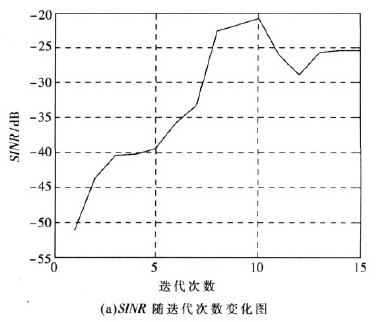
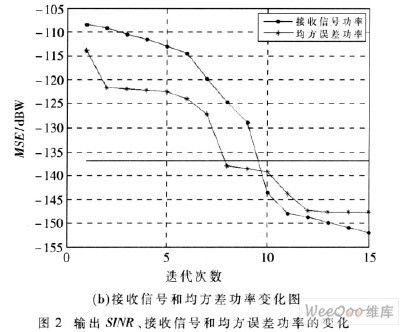
从图2(a)可以明显看出,SINR随迭代次数的变化情况显而易见,当迭代次数为10的时候输出SINR,随后SINR会降低。如图2(b)所示接收信号和MSE功率均用数值表示,点划线、星划线分别表示接收信号MSE的功率,实线是一个功率门限,为-137 dBW,当被检测的各步迭代后的接收信号和MSE功率小于这个门限时停止迭代,以接收信号功率变化为依据,所确定的迭代次数为10;以MSE变化为依据,则所确定的迭代次数为8,不是迭代次数。从图中可以看出,用接收信号功率的变化来确定迭代次数时,门限的选择范围较大,可以从-144 dBW~-129 dBW;而用MSE变化来确定迭代次数,门限的选择范围很小。
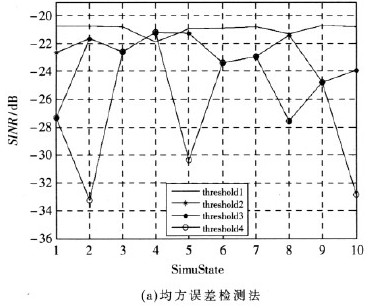
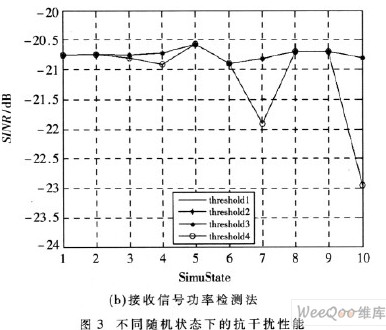
然后以输出SINR衡量抗干扰性能。分为两种情况做仿真:(1)在对迭代过程进行秩选时,检测每步迭代后MSE的变化,当MSE小于所设定的门限时停止迭代;(2)检测接收信号功率的变化,将其与所设定的门限相比较确定迭代次数。每种情况下设定10种随机状态,相同随机状态下每次仿真所产生的随机数相同,从而保证了结果对任何一次仿真公平。每种随机状态下均做4次仿真,将门限分别设为,得到相应情况下的输出SINR,如图3所示。
维库电子通,电子知识,一查百通!
已收录词条937245个


