拉线式位移传感器采用电位器式位移传感器,它通过电位器元件将机械位移转换成与之成线性或任意函数关系的电阻或电压输出。普通直线电位器和圆形电位器都可分别用作直线位移和角位移传感器。但是,为实现测量位移目的而设计的电位器,要求在位移变化和电阻变化之间有一个确定关系。电位器式位移传感器的可动电刷与被测物体相连,物体的位移引起电位器移动端的电阻变化。阻值的变化量反映了位移的量值,阻值的增加还是减小则表明了位移的方向。通常在电位器上通以电源电压,把电阻变化转换为电压输出。传统的拉线式位移传感器由于其电刷移动时电阻以匝电阻为阶梯变化,其输出特性亦呈阶梯形。如果这种位移传感器在伺服系统中用作位移反馈元件的时,则过大的阶跃电压会引起系统振荡。因此在电位器的制作中应尽量减小每匝的电阻值。同时,电位器式传感器的另一个主要缺点是易磨损、分辨力差、阻值偏低、高频特性差,从而导致测量精度的下降。它的优点是:结构简单,输出信号大,使用方便,价格低廉。
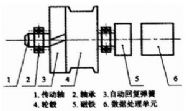
该基于磁敏角度技术的拉线式位移传感器主要由6部分组成,改变传统的拉线式位移传感器接触式、易磨损、高频特性差等缺点,基于磁敏角度技术的拉线式位移传感器以磁场为媒介,将机械位移变化转化为磁场角度变化,一方面解决传统拉线位移传感器的接触方式,另一方面减少了磨损、提高了系统高频特性,从而确保位移检测精度。数据处理运算器,用于对接收到的磁敏角度信号通过数学模型运算为拉线的位移信号。通信接口,通过通信接口与应用系统的设备进行通信,接收来自应用系统设备的命令并将采集到的位移信号反馈给应用系统。从而提高了数据采集精度、稳定性和可靠性,降低了位移传感器的应用门槛。
1)拉线的钢绳缠绕在轮毂上,轮毂与一个磁铁连接在一起,当拉线产生位移的时候,带动轮毂的转动,轮毂的转动造成与轮毂的轴连接的磁铁转动,从而磁铁的磁场产生一个变化的角度。拉线运动发生的时候,自动回复弹簧确保拉线具备一定的张力,确保拉线的位移与磁敏角度的比例关系。
(2)磁敏角度感应器与磁铁安装在同一中心轴,用来感应磁铁角度的变化,选用一种微处理器,该处理器读取磁敏角度信息,并通过建立数学模型,将磁敏角度运算为拉线的位移。
(3)通讯接口,微处理器通过通信接口接收来自应用系统的命令并将位移信息通过通信接口返回给应用系统。
RS 485总线以其结构简单、通信速率高、传输距离远等诸多优点,在工业控制系统中得到了广泛应用。它采用平衡发送和差分接收方式实现通信,发送端将串行口的TTL电平信号转换成差分信号A、B两路输出,经过线缆传输之后在接收端将差分信号还原成TTL电平信号。由于传输线通常使用双绞线,又是差分传输,所以又极强的抗共模干扰的能力,总线收发器灵敏度很高。
在基于磁敏角度技术的拉线式位移传感器中我们设计了一路RS 485信号输出,RS 485接口芯片采用MAX3485,用于与应用系统进行位移数据数据交换。为了确保数据通信的可靠性,通信接口采用了光电隔离芯片6N137。
利用MLX90316构建位置传感器需要使用磁铁,在传感位置安装活动的机械部件(通常连接在轴的末端)。只要水平磁通量均匀的磁铁都可以使用。磁铁的大小和材料并不重要;在机械、磁场和热容限之内,水平磁通量必须在20~70 mT(例如,(45±25)mT)范围以内。
在气隙问题上,如果距离IC表面的实际气隙大于7.5 mm,环形磁铁要优于盘形磁铁。磁铁可以放在轴的末端,使用环形磁铁时可以绕在轴上。也可以使用特,殊的磁铁设计,获得旋转位置传感器正常的传输特性。
在“基于FPGA技术的堤坝位移智能检测系统”中,将基于磁敏角度技术的拉线式位移传感器用于堤坝根石位移采集装置。监测的堤坝一共为7条,每条大坝有5个关键监测点,因此,利用RS 485总线将这35个监测点组成星型网络。从试验结果可以看出,该传感器克服传统拉线式位移传感器的易磨损、分辨力差、阻值偏低、高频特性差等缺点,提高了测量精度。
维库电子通,电子知识,一查百通!
已收录词条937245个