伺服驱动器是用于控制伺服电机的一种驱动装置,其作用类似于用变频器去控制三相异步交流电机。基本的功能是实现电流控制、速度控制和位置控制。
伺服进给系统的要求
1. 调速范围宽
2. 定位精度高
3. 有足够的传动刚性和高的速度稳定性
4. 快速响应,无超调
为了保证生产率和加工质量,除了要求有较高的定位精度外,还要求有良好的快速响应特性,即要求跟踪指令信号的响应要快,因为数控系统在启动、制动时,要求加、减加速度足够大,缩短进给系统的过渡过程时间,减小轮廓过渡误差。
5. 低速大转矩,过载能力强
一般来说,伺服驱动器具有数分钟甚至半小时内1.5倍以上的过载能力,在短时间内可以过载4~6倍而不损坏。
6. 可靠性高
要求数控机床的进给驱动系统可靠性高、工作稳定性好,具有较强的温度、湿度、振动等环境适应能力和很强的抗干扰的能力。
对电机的要求
1、从速到速电机都能平稳运转,转矩波动要小,尤其在低速如0.1r/min或更低速时,仍有平稳的速度而无爬行现象。
2、电机应具有大的较长时间的过载能力,以满足低速大转矩的要求。一般直流伺服电机要求在数分钟内过载4~6倍而不损坏。
3、为了满足快速响应的要求,电机应有较小的转动惯量和大的堵转转矩,并具有尽可能小的时间常数和启动电压。
4、电机应能承受频繁启、制动和反转。
DSP是整个系统的核心,主要完成实时性要求较高的任务,如矢量控制、电流环、速度环、位置环控制以及PWM信号发生、各种故障保护处理等。
MCU完成实时性要求比较低的管理任务,如参数设定、按键处理、状态显示、串行通讯等。
FPGA实现DSP与 MCU之间的数据交换、外部I/O信号处理、内部I/O信号处理、位置脉冲指令处理、第二编码器计数等。
功率电路采用模块式设计,三相全桥整流部分和交-直-交电压源型逆变器通过公共直流母线连接。三相全桥整流部分由电源模块来实现,为避免上电时出现过大的瞬时电流以及电机制动时产生很高的泵升电压,设有软启动电路和能耗泄放电路。逆变器采用智能功率模块来实现。
1. 主回路接线:
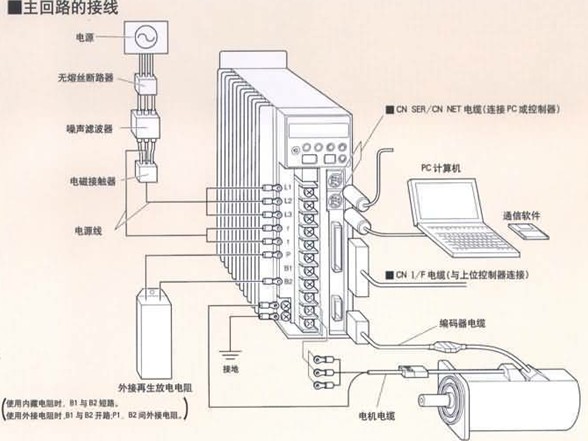
1).R、S、T电源线的连接;
2)伺服驱动器U、V、W与伺服电动机电源线U、V、W之间的接线;
2. 控制电源类接线:
1). r 、t控制电源接线;
2)I/O口控制电源接线;
3. I/O接口与反馈检测类接线:
位置比例增益
①设定位置环调节器的比例增益。
②设置值越大,增益越高,刚度越大,相同频率指令脉冲条件下,位置滞后量越小。但数值太大可能会引起振荡或超调。
③参数数值由具体的伺服系统型号和负载情况确定。
位置前馈增益
①设定位置环的前馈增益。
②设定值越大时,表示在任何频率的指令脉冲下,位置滞后量越小
③位置环的前馈增益大,控制系统的高速响应特性提高,但会使系统的位置不稳定,容易产生振荡。
④不需要很高的响应特性时,本参数通常设为0表示范 围:0~100%
速度比例增益
①设定速度调节器的比例增益。
②设置值越大,增益越高,刚度越大。参数数值根据具体的伺服驱动系统型号和负载值情况确定。一般情况下,负载惯量越大,设定值越大。
③在系统不产生振荡的条件下,尽量设定较大的值。
速度积分时间常数
①设定速度调节器的积分时间常数。
④设置值越小,积分速度越快。参数数值根据具体的伺服驱动系统型号和负载情况确定。一般情况下,负载惯量越大,设定值越大。
②在系统不产生振荡的条件下,尽量设定较小的值。
速度反馈滤波因子
①设定速度反馈低通滤波器特性。
②数值越大,截止频率越低,电机产生的噪音越小。如果负载惯量很大,可以适当减小设定值。数值太大,造成响应变慢,可能会引起振荡。
③数值越小,截止频率越高,速度反馈响应越快。如果需要较高的速度响应,可以适当减小设定值。
输出转矩设置
①设置伺服电机的内部转矩限制值。
②设置值是额定转矩的百分比,
③任何时候,这个限制都有效定位完成范围
①设定位置控制方式下定位完成脉冲范围。
②本参数提供了位置控制方式下驱动器判断是否完成定位的依据,当位置偏差计数器内的剩余脉冲数小于或等于本参数设定值时,驱动器认为定位已完成,到位开关信号为 ON,否则为OFF。
③在位置控制方式时,输出位置定位完成信号,加减速时间常数
①设置值是表示电机从0~2000r/min的加速时间或从2000~0r/min的减速时间。
②加减速特性是线性的到达速度范围
①设置到达速度
②在非位置控制方式下,如果电机速度超过本设定值,则速度到达开关信号为ON,否则为 OFF。
③在位置控制方式下,不用此参数。
④与旋转方向无关。
维库电子通,电子知识,一查百通!
已收录词条937245个


