MEMS传感器是把微机电系统应用于传感器领域,采用微电子和微机械加工技术制造出来的新型传感器。
MEMS传感器是由微传感器、微执行器、信号处理和控制电路、通讯接口和电源等部件组成的一体化的微型器件系统。
MEMS传感器有开环和闭环两种。在作为地震传感器之前,MEMS传感器多于自动控制领域,如美国模拟设备公司的ADX系列开环MEMS传感器(见图1)。该系列加速度传感器既可以测量动态加速度,又可以测量静态加速度。由于其噪声太大,决定了它不能用作地震检波器。
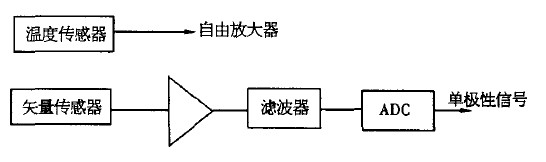
图1 开环加速度传感器原理图
闭环加速度传感器基于电容变化原理,惯性质体将加速度作用进行放大并转换成电容极板的位移。差动电容的变化通过检测电路变成电信号,在经过力平衡回路反馈,激励可移动的电容极板始终处于平衡位置。反馈信号同时作为输出,它表明了输入加速度的大小(见图2)。被反馈力测量的传感器响应值由芯片内部的一个5阶△∑ADC转换成数字量,输出128kHz串行数据位流。

图2 闭环加速度传感器原理图
标准惯性质体的上下表面各沉积着一层导电层(硅片上掺杂金或铝),固定帽上下表面也有沉积层,由此在标准惯性质体和固定帽之间形成可变电容(见图3)。每一块MEMS由4个独立的硅晶片组成,质量体的上下表面是电容器的负极,上下两个极板是电容器的正极。两个极板的间距大约为lOμm,即质量体的位移在±5μm之间。

图3 MEMS传感器工作原理示意图
设两电容(C1、C2)极板间距分别为X1,X2,当惯性质体以加速度a位移时,电容比率为

在MEMS传感器工作原理示意图中,其下端盖与质量体之间的电容为C1,施加的电压为V1;其上端盖与质量体之间的电容为C2 ,施加的电压为V2。未加电时传感器处于休眠状态,重力g向下拉动质量体,此时C1>C2;加电后启动循环,调整V1与V2的大小,以产生一个力来克服重力,直到C1=C2、F1+F2=g,传感器达到平衡,准备记录信号。当接收到沿工作轴向的地震信号时,C1与C2的值被持续不停地采样测量,它们的比例随着质量体移动而不停变化,同时负反馈循环回路改变V1与V2的大小以产生补偿,使质量体向中心位置移动。传感器根据为保持质量体回到中心所需的校正而得到输出信号,而垂直于传感器工作轴向的地震信号则被支撑弹簧阻止,不产生信号输出。
根据ICInsight报告,预计在2007年至2012年间,全球基于MEMS的半导体传感器和制动器的销售额将达到19%的年均复合增长率(CAGR),与2007年的41亿美元相比,五年后将实现97亿美元的年销售额。2007年到2012年间,基于MEMS的传感器和制动器的单位出货量将以27%的CAGR增长,2007年的出货量为13亿件,五年后将达43亿件。同期内传感器/制动器的单位出货量预计以23%的CAGR增长,2012年出货量将达到121亿件,在2007年的出货量是43亿件。若计入各类技术实现的传感器/制动器,则其市场总规模预计将达到119亿美元。根据该报告,基于MEMS的制动器在2007年将占据整体传感器/制动器市场份额的54%。们认为在物联网时代,MEMS传感器凭借着其体积小、成本低以及可与其他智能芯片集成在一起的巨大优势,必将成为传感器的主要生产技术。
维库电子通,电子知识,一查百通!
已收录词条937245个