自适应控制:英文名称为adaptive control。在日常生活中,所谓自适应是指生物能改变自己的习性以适应新的环境的一种特征。因此,直观地讲,自适应控制可以看作是一个能根据环境变化智能调节自身特性的反馈控制系统以使系统能按照一些设定的标准工作在状态。
在反馈控制和控制中,都假定被控对象或过程的数学模型是已知的,并且具有线性定常的特性。实际上在许多工程中,被控对象或过程的数学模型事先是难以确定的,即使在某一条件下被确定了的数学模型,在工况和条件改变了以后,其动态参数乃至于模型的结构仍然经常发生变化。
在发生这些问题时,常规控制器不可能得到很好的控制品质。为此,需要设计一种特殊的控制系统,它能够自动地补偿在模型阶次、参数和输入信号方面非预知的变化,这就是自适应控制。
1.增益自适应控制
2.模型参考自适应控制(MRAC)
3.自校正控制(STC)
4.直接优化目标函数自适应控制
5.模糊自适应控制
6.多模型自适应控制
7.自适应逆控制
2 自校正控制系统 此类自适应控制系统设计方法的理论基础为系统辨识和随机控制理论
自适应系统有两类,一类是模型参考自是要控制系统(model reference adaptive system,MRAS);另一类是自校正控制系统(self-tuning control system),这类自适应系统的一个主要特点是在线辨识对象数学模型的参数,进而修改控制器的参数。
1 模型参考自适应控制系统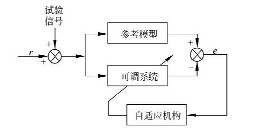
这类自适应控制系统设计方法的理论基础为局部参数优化方法、李雅普诺夫稳定性理论和波波夫(Popov)超稳定性理论。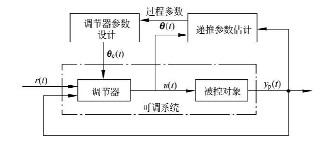
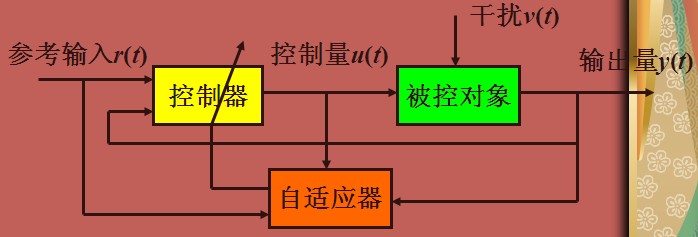
自适应系统主要由控制器、被控对象、自适应器及反馈控制回路和自适应回路组成。
无论是时不变线性系统,还是时变非线性系统,它们与自适应机构所构成的自适应控制系统都是非线性时变系统,分析这类系统的性能是很困难的。
1 稳定性
稳定性问题是一切控制系统的核心问题。因此,设计自适应控制系统应以保证系统全局稳定为原则。如今,随着模型参考自适应控制的发展,各种各样的自适应控制律会不断诞生,要保证系统全局稳定也很困难,特别是因为系统是本质非线性时变的,故当系统存在未建模动态或随机干扰时,要证明自适应控制系统的稳定性就更困难了。
2 收敛性
对于一些自适应系统收敛性的结论都是在一些相当强的假设条件下获得的,并且与具体的算法密切相关。因所使用的收敛性分析方法缺乏普适性,因而不能推广到稍微复杂的系统模型上。
3 鲁棒性
目前,参考模型自适应控制系统一般都是针对被控对象结构已知而参数未知的情况进行设计的,而实际被控对象结构往往难以确切知道,所获得的对象特性中常常未能包括系统的难以描述的寄生高频成分,即未建模动态。计算机仿真表明,这种未建模型动态可能引起自适应控制系统的不稳定,关键原因是自适应控制系统是非线性时变的,,而对于线性反馈控制系统,只有设计的系统有足够的稳定裕量,这种未建模动态是不致于破坏系统稳定性的。这就提出了自适应控制的鲁棒性问题。
4 性能指标
一个自适应控制系统能很好地工作,不仅要求所设计的系统稳定,而且还有满足一定的性能指标要求。由于自适应控制系统是非线性时变的,初始条件的变化或未建模动态的存在都势必要改变系统的运动轨迹,因此,分析自适应控制系统的动态品质是极其困难的。目前,这方面的成果还很少见。
1、控制器可调
相对于常规反馈控制器固定的结构和参数,自适应控制系统的控制器在控制的过程中一般是根据一定的自适应规则,不断更改或变动的;
2、增加了自适应回路
自适应控制系统在常规反馈控制系统基础上增加了自适应回路(或称自适应外环),它的主要作用就是根据系统运行情况,自动调整控制器,以适应被控对象特性的变化;
3、适用对象
自适应控制适用于被控对象特性未知或扰动特性变化范围很大,同时又要求经常保持高性能指标的一类系统,设计时不需要完全知道被控对象的数学模型。
自适应控制系统首先是由Draper和Li在1951年提出的,他们介绍了一种能使性能特性不确定的内燃机达到性能的控制系统,这种类型的控制能力能自动的达到的操作点,所以叫做控制或极值控制。而自适应这一名词是1954年由Tsien在《工程控制论》一书中提出的。其后,在1955年Benner和Drenick也提出一个控制系统具有“自适应”的概念。
自适应控制发展的重要标志是在1958年Whitaker及同事设计的一种自适应飞机控制系统。
1960年Li和Van Der Velde提出的自适应控制系统,它的控制回路中用一个极限环使参数不确定性得到自动补偿,这样的系统称为自振荡的自适应系统。
Petror等人在1963年介绍一种自适应系统,它的控制输入由开关函数或继电器产生,并以与参数值有关的系统轨线不变性原理为基础来设计系统。这种系统称为变结构系统。
而几年来许多学者在自适应控制系统的稳定性、收敛性和设计方法上做了大量的有益工作,其中有美国的Narendar,Morse和澳大利亚的Goodwin。我国学者陈翰馥在收敛性分析方面也作出很大贡献。
维库电子通,电子知识,一查百通!
已收录词条45536个


